|
I am a PhD student at the University of Washington in Computer Science and Engineering supervised by Prof. Ali Farhadi and Prof. Ranjay Krishna (RAIVN Lab). I'm also currently a research intern at General Robotics. Previously, I was a graduate student researcher with PRIOR team at the Allen Institute for AI (AI2). During the summers of 2023 and 2024, I worked as a research intern at Allen Institute for AI (AI2), where I collaborated closely with Kuo-Hao Zeng, Kiana Ehsani, Rose Hendrix, and Aniruddha Kembhavi. Before that, I received my B.S. in Computer Engineering from Sharif University of Technology. During my undergraduate studies, I was a visiting student at EPFL where I worked in VILAB under the supervision of Prof. Amir Zamir. My research interests lie in the intersection of robot learning, computer vision, and embodied-AI. |

|
|
|
|
|
|
|
|
|
|
|
Haoquan Fang*, Jiafei Duan*, Donovan Clay, Sam Wang, Shuo Liu, Weikai Huang, Xiang Fan, Wei-Chuan Tsai, Shirui Chen, Yi Ru Wang, Shanli Xing, Jaemin Cho, Jae Sung Park, Ainaz Eftekhar, Peter Sushko, Karen Farley, Angad Wadhwa, Cole Harrison, Winson Han, Ying-Chun Lee, Eli VanderBilt, Rose Hendrix, Suveen Ellawela, Lucas Ngoo, Joyce Chai, Zhongzheng Ren, Ali Farhadi, Dieter Fox, Ranjay Krishna ArXiv 2026 (in submission) blog / paper / code / data / models
MolmoAct2 is a family of fully open action reasoning models for real-world deployment across heterogeneous robot platforms |
|
|
Abhay Deshpande*†, Maya Guru*†, Rose Hendrix*†, Snehal Jauhari*†, Ainaz Eftekhar†, Rohun Tripathi†, Max Argus†, Jordi Salvador†, Haoquan Fang†, Matthew Wallingford†, Wilbert Pumacay†, Yejin Kim†, Quinn Pfeifer, Ying-Chun Lee, Piper Wolters, Omar Rayyan, Mingtong Zhang, Jiafei Duan*, Karen Farley, Winson Han, Eli VanderBilt, Dieter Fox, Ali Farhadi, Georgia Chalvatzaki, Dhruv Shah, Ranjay Krishna † Core Contributors ArXiv 2026 (in submission) blog / paper / video / code / data / models
MolmoBot shows training manipulation policies on massive, diverse simulation data can transfer zero-shot to the real world—for both static and mobile manipulation tasks |
|
|
Yejin Kim, Wilbert Pumacay, Omar Rayyan, Max Argus, Winson Han, Eli VanderBilt, Jordi Salvador, Abhay Deshpande, Rose Hendrix, Snehal Jauhari, Shuo Liu, Nur Muhammad Mahi Shafiullah, Maya Guru, Arjun Guru, Ainaz Eftekhar, Karen Farley, Donovan Clay, Jiafei Duan*, Piper Wolters, Alvaro Herrasti, Ying-Chun Lee, Georgia Chalvatzaki, Yuchen Cui, Ali Farhadi, Dieter Fox, Ranjay Krishna RSS 2026 blog / paper / code / data
MolmoSpaces is a large-scale, fully open platform for studying embodied learning. MolmoSpaces supports physics-grounded navigation and manipulation, unifying over 230k indoor scenes and more than 130k object models with over 42 million annotated robotic grasps in a single ecosystem. |
|
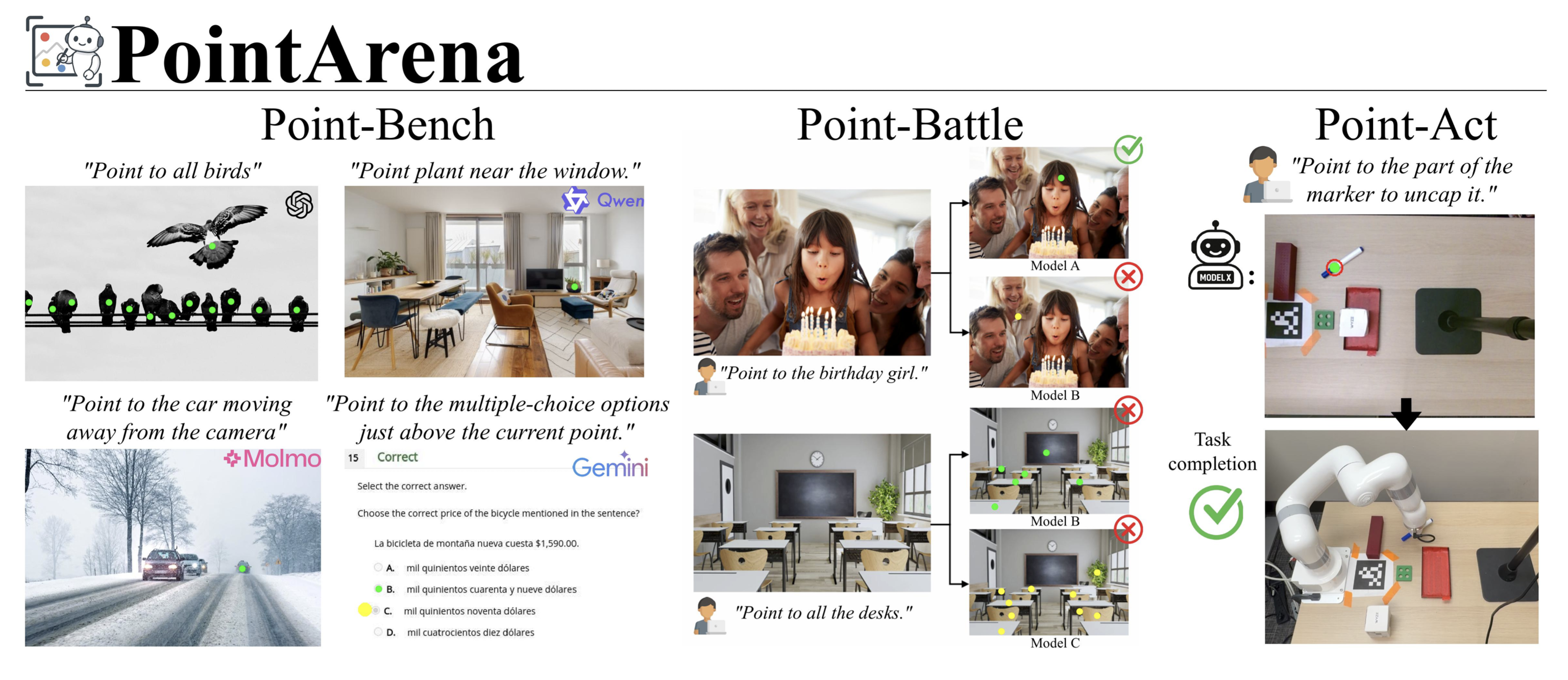
Long Cheng*, Jiafei Duan*, Yi Ru Wang, Haoquan Fang, Boyang Li, Yushan Huang, Elvis Wang, Ainaz Eftekhar, Jason Lee, Wentao Yuan, Rose Hendrix, Noah A. Smith, Fei Xia, Dieter Fox, Ranjay Krishna, ArXiv 2025 (in submission) project page / arXiv / code
PointArena is a comprehensive platform for evaluating multimodal pointing across diverse reasoning scenarios. |
|
Ainaz Eftekhar, Rose Hendrix, Luca Weihs, Jiafe Duan, Ege Caglar, Jordi Salvador, Alvaro Herrasti, Winson Han, Eli VanderBilt, Aniruddha Kembhavi, Ali Farhadi, Ranjay Krishna Kiana Ehsani*, Kuo-Hao Zeng* ICRA 2026 [Oral] project page / arXiv / code / data / model
RING is an embodiment-agnostic policy, trained solely in simulation with diverse randomly initialized embodiments at scale. RING generalizes to diverse real-world embodiments despite being trained exclusively in simulation without access to the real robot configurations. |
|
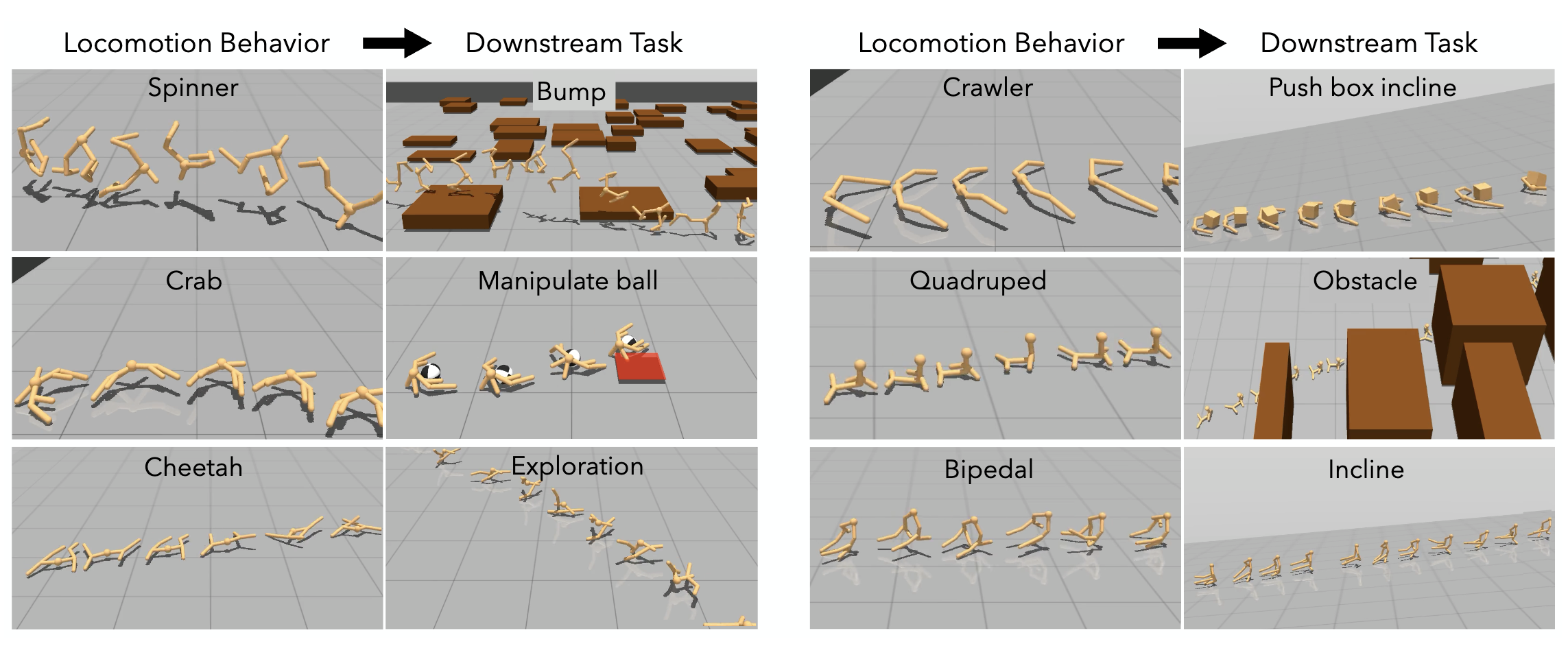
Ainaz Eftekhar*, Hyeonseong Jeon*, Aaron Walsman, Kuo-Hao Zeng, Ali Farhadi, Ranjay Krishna NeurIPS, 2025 project page / arXiv / code
LOKI |
 (Locally Optimized Kinematic Instantiations) is a compute-efficient co-design framework that discovers diverse, high-performing robot morphologies (divergent forms) using shared control policies (convergent functions).
(Locally Optimized Kinematic Instantiations) is a compute-efficient co-design framework that discovers diverse, high-performing robot morphologies (divergent forms) using shared control policies (convergent functions).
|
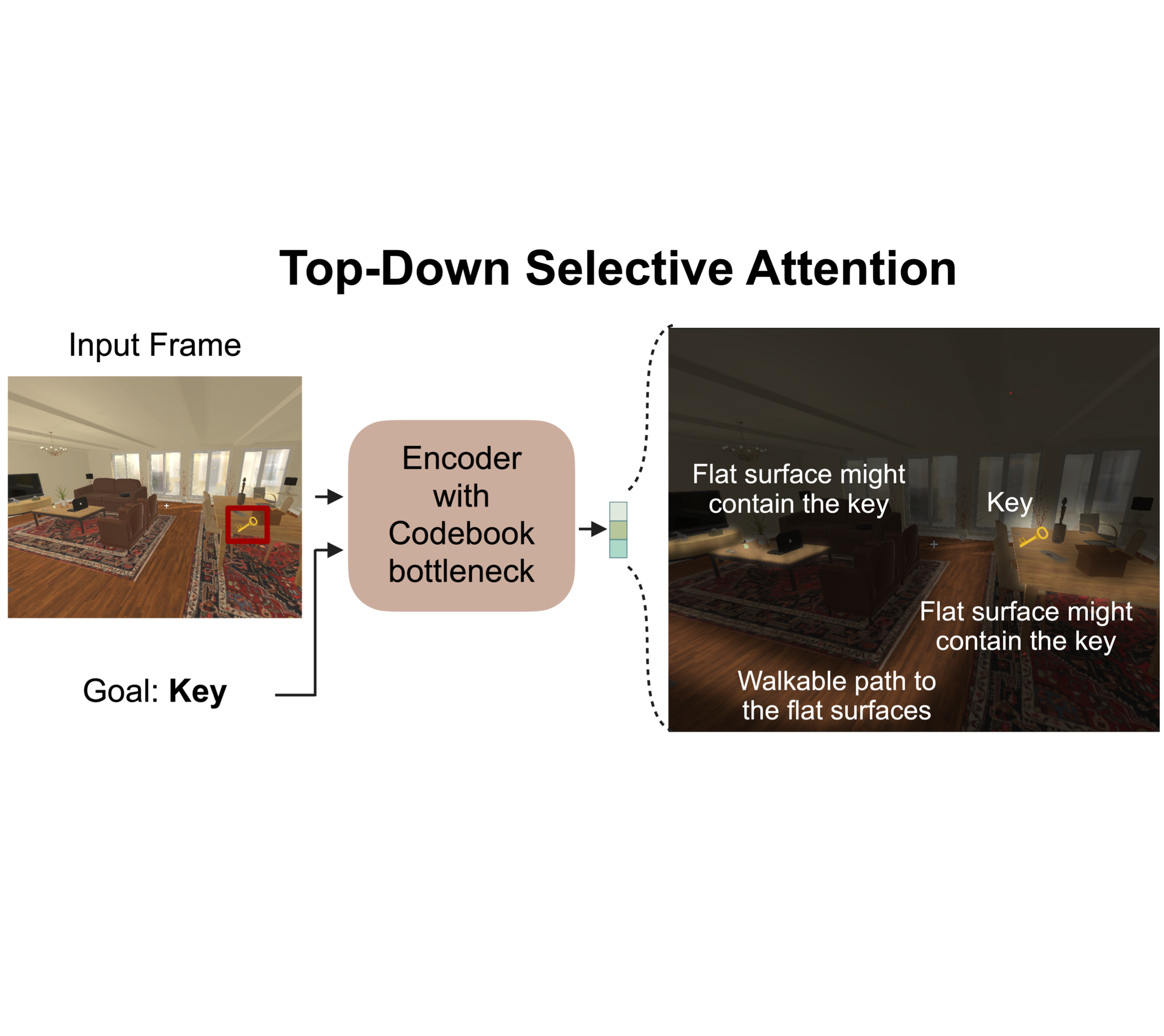
Ainaz Eftekhar*, Kuo-Hao Zeng*, Jiafei Duan, Ali Farhadi, Ani Kembhavi, Ranjay Krishna ICLR, 2024 [Spotlight] project page / arXiv / code
Inspired by selective attention in humans—the process through which people filter their perception based on their experiences, knowledge, and the task at hand—we introduce a parameter-efficient approach to filter visual stimuli for Embodied-AI. |
|
Ainaz Eftekhar*, Alexander Sax*, Roman Bachmann, Jitendra Malik, Amir Zamir ICCV, 2021 project page / arXiv / code
A pipeline to resample comprehensive 3D scans from the real-world into static multi-task vision datasets. |
|
|
Design and source code from Jon Barron's website. |